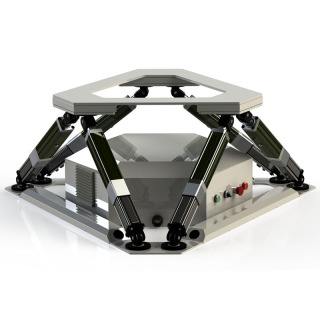
Automobile driving simulator motion base
Motion bases are widely used in various training simulators, such as flight simulators, ship simulators, naval helicopter take-off and landing simulation platforms, tank simulators, car driving simulators, train driving simulators, earthquake simulators, dynamic movies, entertainment equipment and other fields, and even in the docking of space spacecraft and refueling docking of air tankers; Cultural entertainment equipment, new interactive entertainment experience equipment, engineering simulation, design evaluation, testing, experiment, task training, training evaluation, environmental simulation, event recurrence, etc.
Main Specification:
System performance
Posture Unit Amplitude Velocity Heave mm ±160 375mm/s Surge mm ±160 375mm/s Sway mm ±160 375mm/s Pitch ° ±16 15°/s Roll ° ±16 15°/s Yaw ° ±16 15°/s
Payload specification
| Product weight | 349 kg |
| Payload | 1000 kg |
Product dimensions
| Length | 2000 mm |
| Width | 1515 mm |
| Min.Height | 780 mm |
Power requirements
| Power supply | 380V three phase |
| Connection | Ethernet |
Control system(Electrical cabinet)

Control system: the embedded control software runs on the main controller, and the motion controller uses the Gugao high-performance bus motion controller, and uses the forward and inverse kinematics algorithm independently developed by our company to realize the motion control of the six-degree-of-freedom motion platform.
The control software includes but is not limited to the following functional modules: system self-inspection function module, network connection function module, parameter configuration function module, state machine function module, data preprocessing function module, trajectory planning function module, kinematics calculation function module, bus communication function module, digital I/O function module, state feedback function module, fault alarm function module, and security function module.
The control software provides the secondary development interface and opens the communication interface and protocol to Party A. The six-degree-of-freedom platform runs smoothly, smoothly and without stumbling. The forward and inverse kinematics algorithms feed back the attitude of the platform or the position data of the electric cylinder in real time. The algorithm has the internal security protection function for the platform, which will not cause damage to the platform if the user mistakenly inputs the data!