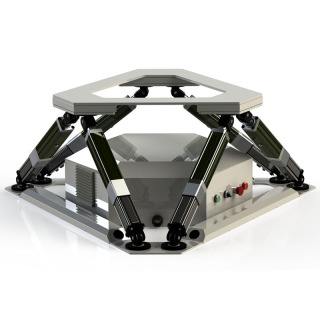
Ship simulator motion base
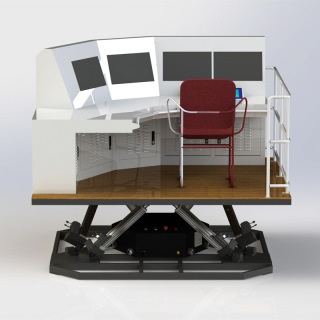
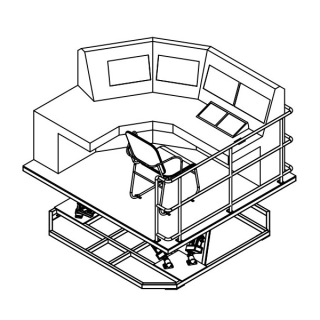
The navigation simulator product equipped with 6-DOF motion platform can meet various business training needs, such as crew training, pilot training, VTS operator training, GMDSS radio operator training, and other special business training (tugboat operation, fishery operation, navigation in ice area, inland navigation, yacht operation, oil spill emergency, search and rescue), and can also be used for scientific research such as port and navigation engineering demonstration, intelligent marine equipment verification, etc.
The six-degree-of-freedom motion platform can simulate the motion attitude of the ship in the process of operation, realize the test of the ship equipment, provide users with complete sea state test data, and assist and cooperate with users to complete the test experiment of the ship equipment; It can provide driving training equipment according to user requirements and virtual equipment to simulate ship driving environment and movement posture. We can provide you with product customization, customized wave spectrum input interface, meet the user's requirements for sea conditions, and combine VR technology to highly restore the scene and environment.

Main Specification:
System performance
| Posture | Unit | Amplitude | Velocity |
| Heave | mm | ±200 | 250mm/s |
| Surge | mm | ±200 | 250mm/s |
| Sway | mm | ±200 | 250mm/s |
| Pitch | ° | ±25 | 25°/s |
| Roll | ° | ±25 | 25°/s |
| Yaw | ° | ±25 | 25°/s |
Payload specification
| Product weight | 330 kg |
| Payload | 500 kg |
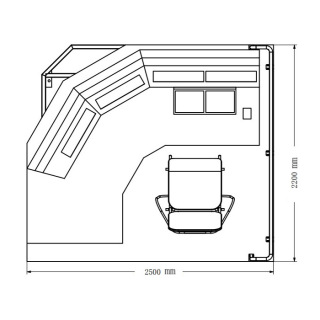
Product dimensions
| Length | 2500 mm |
| Width | 2200 mm |
| Min.Height | 820 mm |
Power requirements
| Power supply | 380V three phase |
| Connection | Ethernet |
Control system(Electrical cabinet)

Control system: the embedded control software runs on the main controller, and the motion controller uses the Gugao high-performance bus motion controller, and uses the forward and inverse kinematics algorithm independently developed by our company to realize the motion control of the six-degree-of-freedom motion platform.
The control software includes but is not limited to the following functional modules: system self-inspection function module, network connection function module, parameter configuration function module, state machine function module, data preprocessing function module, trajectory planning function module, kinematics calculation function module, bus communication function module, digital I/O function module, state feedback function module, fault alarm function module, and security function module.
The control software provides the secondary development interface and opens the communication interface and protocol to Party A. The six-degree-of-freedom platform runs smoothly, smoothly and without stumbling. The forward and inverse kinematics algorithms feed back the attitude of the platform or the position data of the electric cylinder in real time. The algorithm has the internal security protection function for the platform, which will not cause damage to the platform if the user mistakenly inputs the data!